SUBSYSTEM DESIGN AND DEVELOPMENT OF AUTONOMOUS VEHICLE
I have received an opportunity to work as an Intern in Mahindra & Mahindra from May 2019 to July 2019. We got the opportunity to work at Mahindra Research Valley, Chennai. It is the first R&D facility in the world to have combined important scales of auto and tractor product development under one roof. The shared ground between its systems, simulation, powertrain, and material testing served as the foundation for significant cost reductions and synergies in the R&D infrastructure. We worked under the guidance of Dr. Shankar Venugopal, Vice President, Mahindra & Mahindra. We worked on a project to develop an Autonomous Vehicle, using image processing and computer vision. This project was under the direct supervision of Mr. Praveen Kumar, Principal Engineer, Mahindra Group. The project was funded by Society of Automotive Engineers, India.

The project focussed on three major objectives: Lane Detection, Obstacle Detection and Traffic Signal Detection. We have made a small working prototype with a 1080p webcam mounted on top of the vehicle, to act as the eye. We used image processing and computer vision to tackle these problems and have worked on open source libraries like OpenCV to achieve this. The codes were written in Python and belong to Mahindra & Mahindra as their intellectual property.


Lane Detection
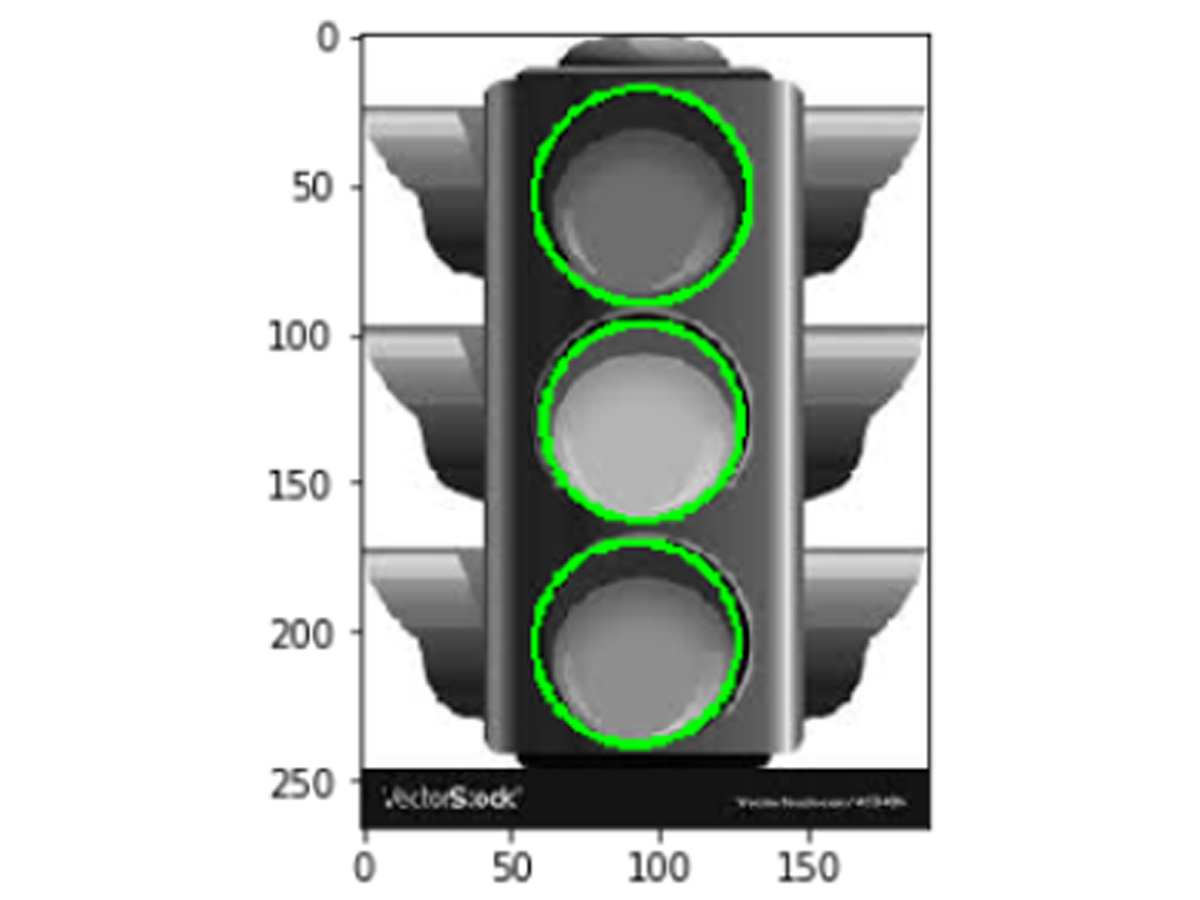
Traffic Signal Detection
Object Detection
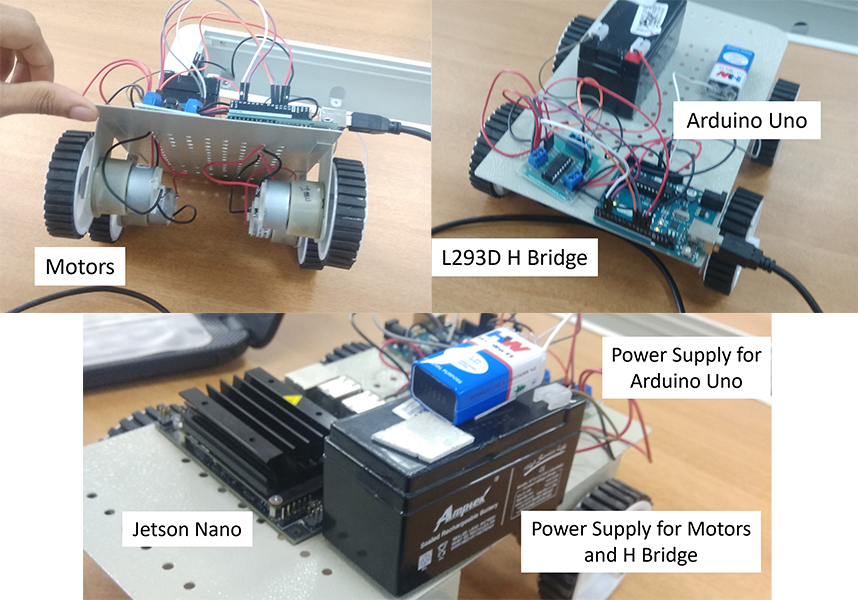
A working prototype was made to ensure proper movement of the vehicle and to enable proper turning of the vehicle, at turns. The prototype was designed to run at a speed 10 kmph. The electronics used in this system have been considered with respect to this speed and the computational power of the processor has been selected accordingly. We have used Jetson Nano for parallel processing, and the vehicle is controlled using an Ardunio Uno board and a H Bridge to control the motors in pairs. We have taken the front wheel span more than the rear wheel span, for the ease of movement in clutch situations. We used normal DC motors to propel the wheels and the power supply for the Jetson Nano and the Arduino Uno is given through a separate rechargeable battery.
 We have finished the project with the prototype following the lane detection and object detection and responding accordingly. I would like to thank the
administration team of Mahindra Research Valley for giving us the opportunity and the freedom to work. I also got the chance to have a look at
the world class research on industrial scale, going on in the facility. I would also like to thank SAE India for funding the project.
We have finished the project with the prototype following the lane detection and object detection and responding accordingly. I would like to thank the
administration team of Mahindra Research Valley for giving us the opportunity and the freedom to work. I also got the chance to have a look at
the world class research on industrial scale, going on in the facility. I would also like to thank SAE India for funding the project.

